6 wheel tank drive robot controlled wirelessly via remote software application.
Context
Catermulcher is a prototype robot designed to meet a request for proposal for fighting wildfires as part of Praxis III.
Due to the hazards and accessibility challenges associated with wildfire response, Catermulcher was designed for remote operation during debris-clearing activities.
Key Features
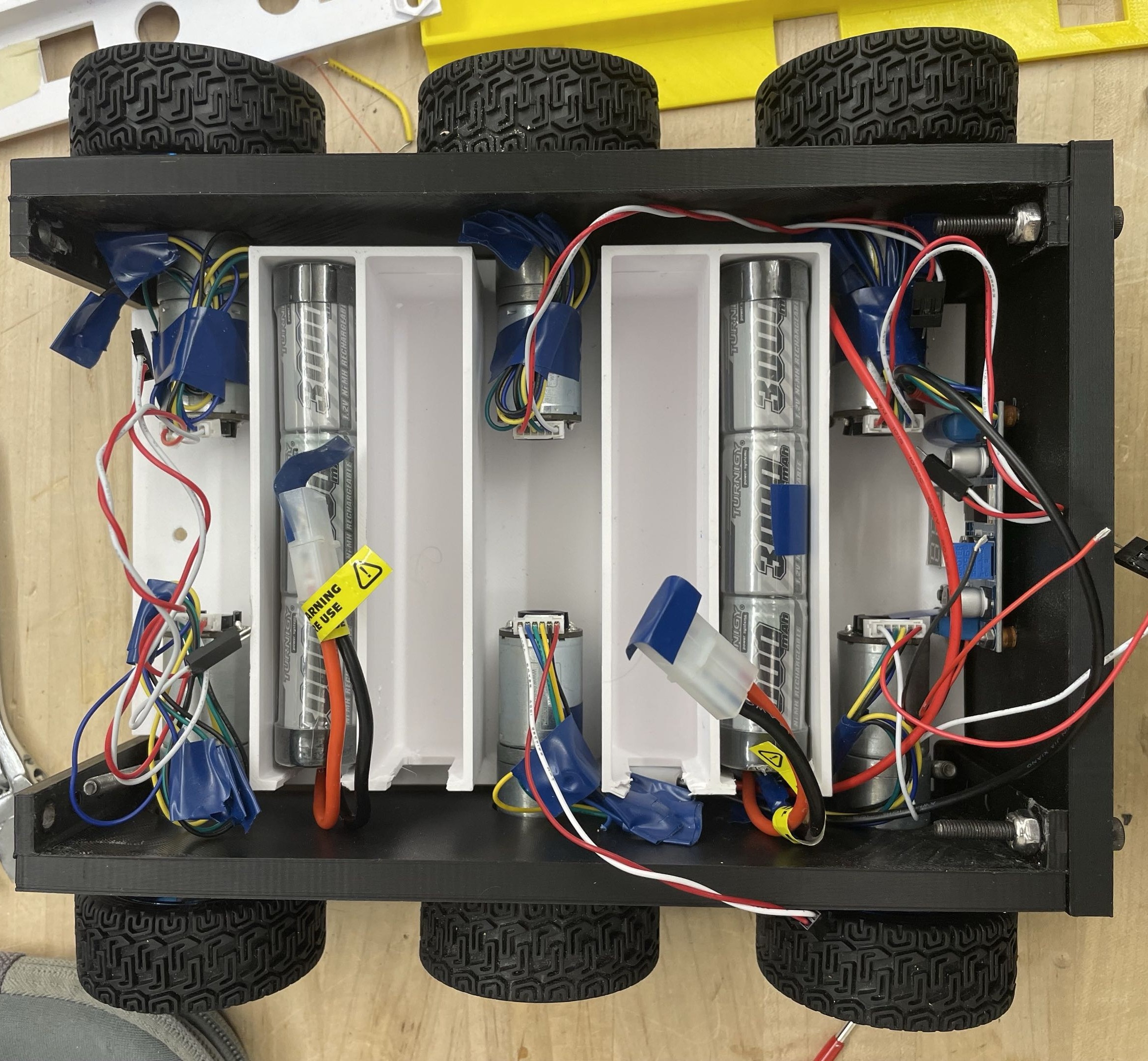
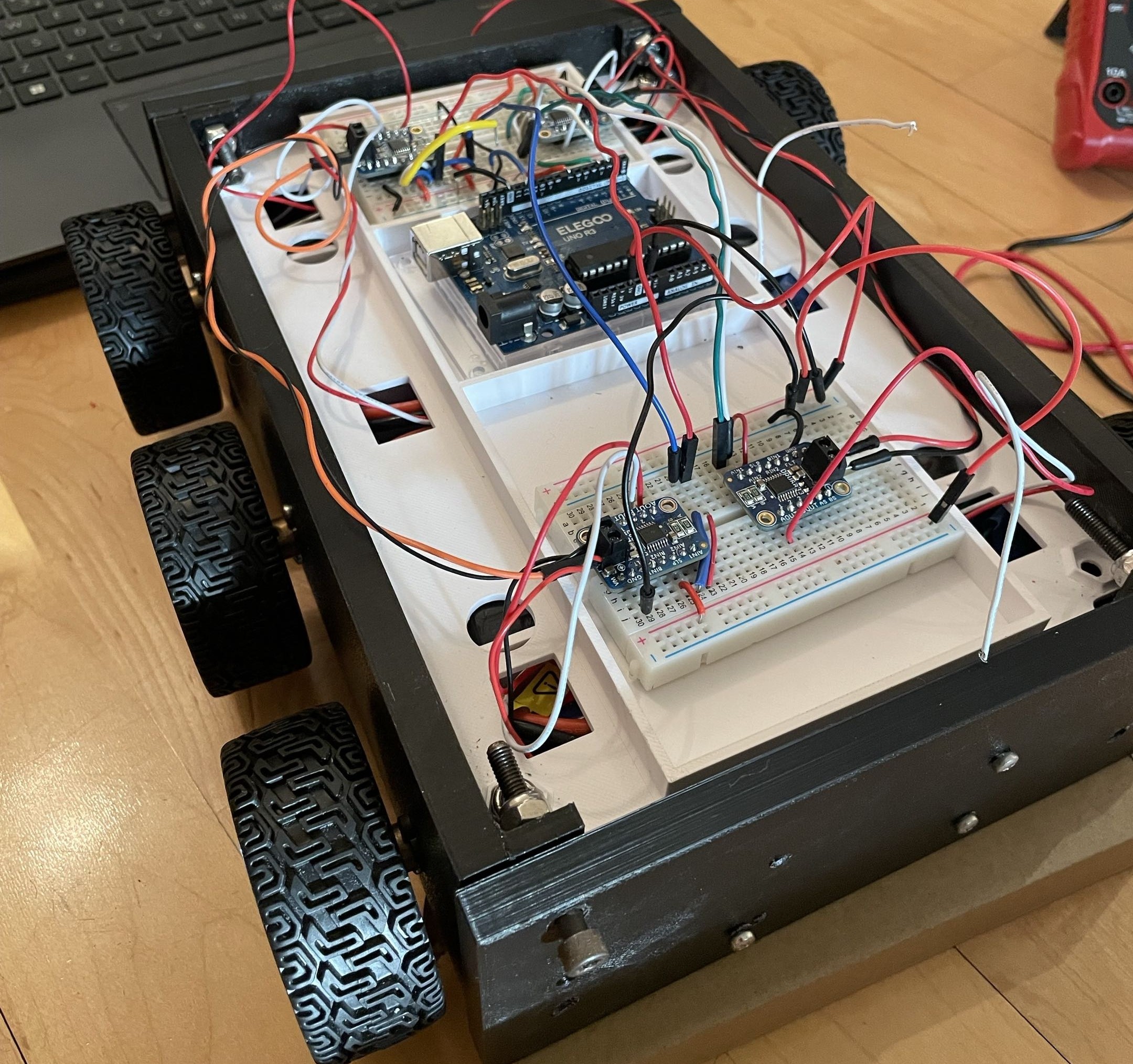
Electrical: Arduino and ESP MCUs, lithium-ion battery, switch mode power regulators, full-bridge motor controllers, brushless motors
Mechanical: 6 wheel drivetrain, rotating mulcher and flaps
Software: embedded firmware for motor control, Android Studio mobile application
Engineering Design Images
Integration of batteries with switch mode power supplies to power motors.Motor spin test with full bridge motor controller modules.